Designing actuation systems for animatronic figures via globally optimal discrete search
Abstract
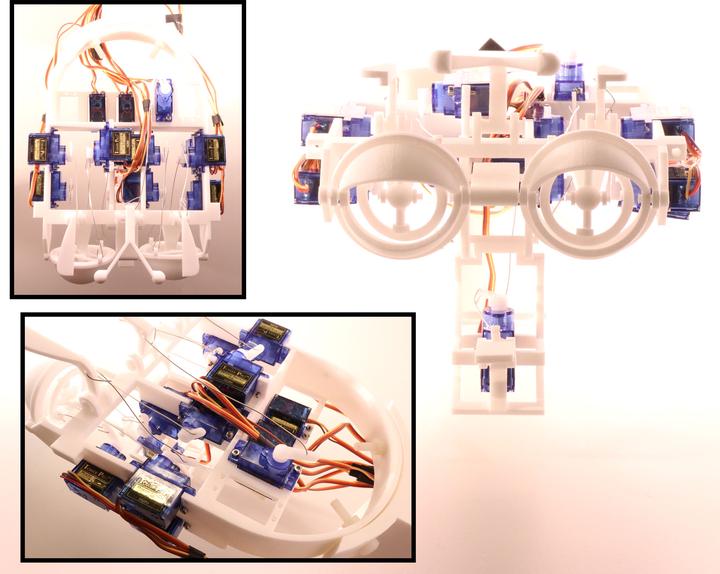
We present an algorithmic approach to designing animatronic figures – expressive robotic characters whose movements are driven by a large number of actuators. The input to our design system provides a high-level specification of the space of motions the character should be able to perform. The output consists of a fully functional mechatronic blueprint. We cast the design task as a search problem in a vast combinatorial space of possible solutions. To find an optimal design in this space, we propose an efficient best-first search algorithm that is guided by an admissible heuristic. The objectives guiding the search process demand that the design remains free of singularities and self-collisions at any point in the high-dimensional space of motions the character is expected to be able to execute. To identify worst-case self-collision scenarios for multi degree-of-freedom closed-loop mechanisms, we additionally develop an elegant technique inspired by the concept of adversarial attacks. We demonstrate the efficacy of our approach by creating designs for several animatronic figures of varying complexity.