Roi Poranne - Research
Roi Poranne - Research
Home
Publications
Contact
Light
Dark
Automatic
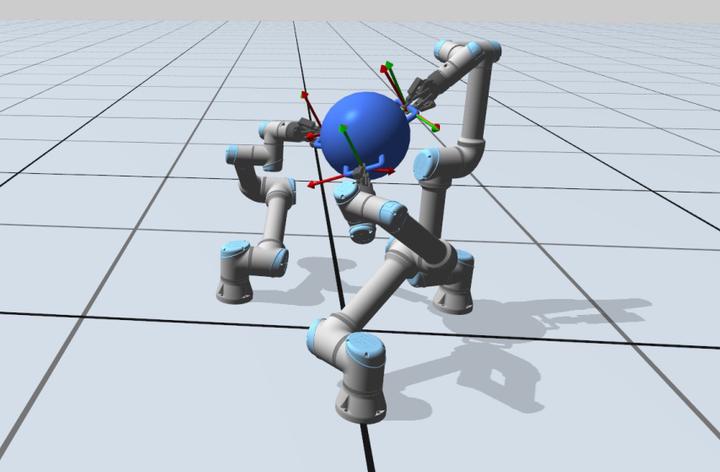
Manipulability optimization for multi-arm teleoperation
Florian Kennel-Maushart
,
Roi Poranne
,
Stelian Coros
IEEE International Conference on Robotics and Automation (ICRA) 2021
2021
PDF
Cite
Type
Conference paper
Publication
IEEE International Conference on Robotics and Automation (ICRA) 2021
Cite
×