Roi Poranne - Research
Roi Poranne - Research
Home
Publications
Contact
Light
Dark
Automatic
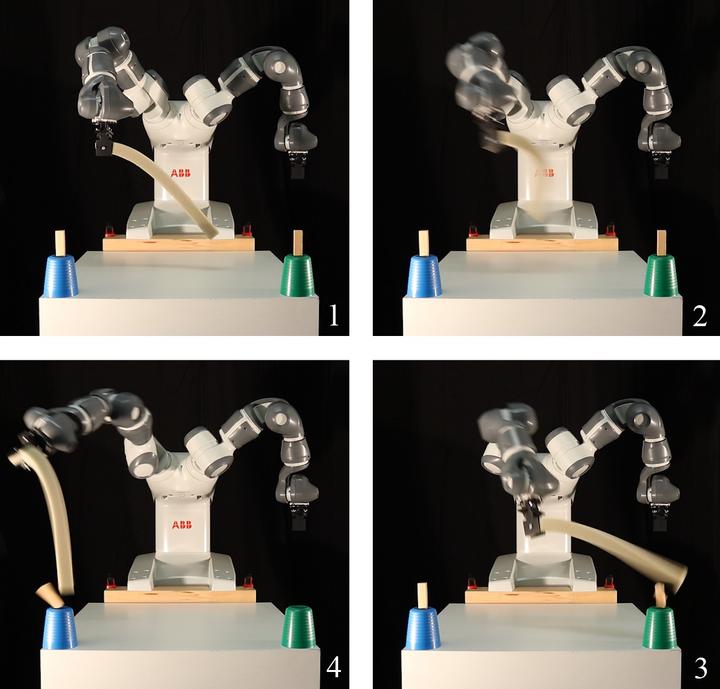
Dynamic manipulation of deformable objects with implicit integration
Simon Zimmermann
,
Roi Poranne
,
Stelian Coros
IEEE Robotics and Automation Letters
2021
PDF
Cite
Type
Journal article
Publication
IEEE Robotics and Automation Letters
Cite
×