Roi Poranne - Research
Roi Poranne - Research
Home
Publications
Contact
Light
Dark
Automatic
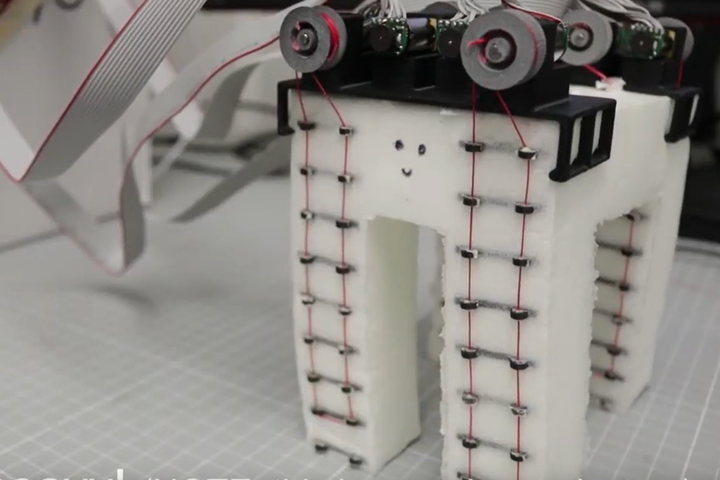
Trajectory optimization for cable-driven soft robot locomotion
James M Bern
,
Pol Banzet
,
Roi Poranne
,
Stelian Coros
2019
PDF
Cite
Type
Journal article
Cite
×